


拿森发布三款线控底盘新品 助力智能网联新能源汽车驶向未来
6月5日,第一届自动驾驶线控底盘技术研讨会暨拿森新产品发布会在浙江杭州举行。
中国汽车工业协会原常务副会长兼秘书长、中国汽车芯片产业创新战略联盟联席理事长董扬,中国工程院院士、北京理工大学教授孙逢春,清华大学车辆与运载学院教授、汽车安全与节能国家重点实验室主任、国家智能网联汽车创新中心首席科学家李克强,上海交通大学智能网联电动汽车创新中心主任、汽车工程研究院副院长殷承良,重庆长安汽车股份有限公司研究总院副总经理郑长江,厦门金龙联合汽车有限公司副总工程师、阿波龙事业部总经理陈卫强,上海拿森汽车电子有限公司总经理陶喆出席并发表演讲,盖世汽车总裁周晓莺主持会议。
吉利、北汽、宇通、上汽大通、蔚来、理想、百度等众多企业嘉宾到场,与行业大咖、产业上下游企业嘉宾共同探讨智能网联新能源汽车未来驶向何处。

参会嘉宾合影
♦ 行业大咖共谋智能网联新能源汽车未来

中国汽车工业协会原常务副会长兼秘书长、中国汽车芯片产业创新战略联盟联席理事长董扬
在研讨会上,董扬谈及“十四五”期间中国汽车产业具备的新特点。一是以国内大循环为主、国际国内双循环相互促进的新发展格局;二是中国汽车产业已形成较强的自主创新能力;三是,进一步开放是大政方针;四是未来汽车更加重视安全;五是要重视互联网思维对汽车消费的影响,以及新购车群体的市场需求;六是技术革命正在引起汽车产业变革,汽车产品的应用范围、性能属性,以及与其他社会基础设施的关系都在发生变化;第七,中国正成为汽车新技术研发、生产、应用的“中心舞台”。

中国工程院院士、北京理工大学教授 孙逢春
围绕“十四五”期间,中国汽车产业在前瞻研究、产业瓶颈、技术短板、验证平台存在的关键问题等,孙逢春在会上进行阐述。他认为,在智能网联关键技术,首先,要构建完善的汽车大数据技术体系和国家监管平台;二是要用数字化手段,实现高安全、高效率、低成本的车路协同架构设计;三是自动驾驶将在城市出行、物流出租、矿山港口等场景领先应用;此外,协同式智慧座舱、协同式驾驶引导、数字路网等协同智能将成为新增长点,形成千亿到万亿级新经济规模。

清华大学车辆与运载学院教授、汽车安全与节能国家重点实验室主任 李克强
李克强更是提出了智能网联新能源汽车的“中国方案”。即通过建立中国方案的智能网联汽车信息物理系统架构,充分融合智能化与网联化发展特征,以五大基础平台为载体,打造车-路-云一体化智能网联汽车系统。五大基础平台为车控基础平台、云控基础平台、高精度动态地图基础平台、信息安全基础平台和车载终端基础平台。作为智能网联汽车新型“零部件”,五大基础平台将对未来智能网联汽车整车感知决策规划乃至底盘控制执行将产生重要影响,并将构建起新的产业形态。
♦ 助力产业变革,拿森一举发布三大新品
“无线控,不自动驾驶”,谈及发展线控底盘系统对于自动驾驶的重要意义,中国线控底盘系统供应商上海拿森汽车电子有限公司总经理陶喆如是说。

上海拿森汽车电子有限公司总经理 陶喆
在研讨会上,拿森正式发布支持L3/L4线的冗余线控制动解决方案、全冗余双小齿轮线控转向系统及底盘域控制器NXU(定位于自动驾驶小脑),助力自动驾驶在更多场景落地。
自2016年成立之初,拿森就致力于成为中国线控底盘领导者。为此拿森先后规划了多款线控底盘核心产品,包括NBooster智能制动系统、ESC电子稳定控制系统、EPS智能转向系统,以及应对未来集中式线控底盘的域控制器,其中NBooster和ESC已成功搭载于多款量产车型上。据记者了解,在百度L4无人驾驶小巴“阿波龙”以及Robotaxi上也有拿森的身影。
新品发布会上,拿森推出了全新的NBooster+ESC冗余线控制动解决方案。据陶喆介绍,这套方案具备电源冗余、通讯冗余、控制器冗余、执行器冗余、轮速冗余和驻车冗余6大制动冗余特征,可充分满足L2松手辅助、L3/L4/L5自动驾驶、限制场景/全自动泊车等不同场景里的自动驾驶应用。“随着自动驾驶级别越来越高,尤其是L3+自动驾驶,对底盘控制的首要需求就是‘冗余’和‘安全’。”陶喆指出。
拿森冗余线控制动解决方案
拿森还正式推出了全冗余双小齿轮线控转向系统。该系统具备6大冗余特征:双份独立互为备份的32位MCU、电机本体冗余备份、扭矩转角传感器冗余、电机转角传感器冗余、双路独立供电、双路独立CAN通讯,并具备高精度的位置控制能力,在任意一个单点失效下,均可保证转向系统的可用性,而无需退出自动驾驶模式。

拿森全冗余双小齿轮线控转向系统
据悉,为了应对不同市场需求,拿森还专门设计了两个版本,基础版最大齿条力12.5KN,新版本可达16.5KN,重点面向轻客市场,是可支持高速公路巡航、交通拥堵巡航、自动代客泊车等L3/L4应用的全冗余版本。
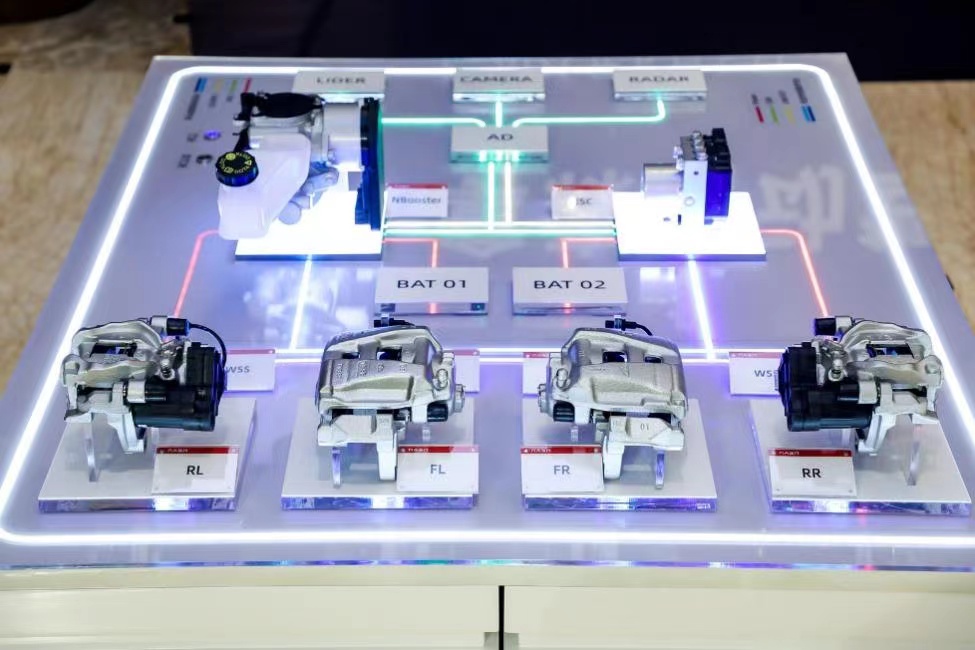
底盘域控制器NXU(自动驾驶小脑)集成了转向、制动和悬架控制算法,可通过直接采集APS、PTS、TAS、HSS、WSS、IMU等传感器信号,与转向、制动、稳定、悬挂、动力系统等模块通过CAN FD进行通讯(可根据整车通讯架构升级为以太网或Flexray模式),进而实现横向、纵向和垂向6个自由度的协同控制,以提供更舒适的驾乘体验。

拿森底盘域控制器NXU
在设计上,NXU基于软硬分离的开发思路,使得整车厂可以灵活选取硬件,从而降低车辆平台的开发和维护成本。并且同样采用了包括通信、供电、信号和控制单元在内的全冗余设计,能够满足ISO 26262 ASIL-D功能安全等级。
编辑:黄霞



